
AI原生时代,自动驾驶到底拼什么?
AI原生系统的普及,正把自动驾驶推向一场全新的竞赛——它的赛场上,算力、软件、数据和半导体正在争抢同一个领奖台。
汽车行业的高级驾驶辅助系统(ADAS)与自动驾驶(AD)正进入一个新阶段,生成式AI成了这个阶段的底色。不是锦上添花,而是核心引擎。
这股力量正在加速行业向AI原生端到端(E2E)架构的转型。这种架构可以理解为,系统直接从海量数据中学习怎么开车。跟以前那些靠工程师一条条写规则的系统相比,端到端架构更能适应陌生的路况,也更能搞定复杂的驾驶场景。数据量越大,它迭代得越快——这是个正循环。
这套技术逻辑,正在改写ADAS和自动驾驶的商业规则。过去,谁的车造得更好,谁就占优势。现在呢?优势往那些懂AI模型、懂半导体、懂云基础设施、懂大规模数据采集、懂软硬件集成验证的企业手里集中。恰好,消费者对自动驾驶的关注度在升温,这个领域的投资也在持续增长。
这么看下来,自动驾驶已经不只是汽车工程的问题了——它越来越像是一场AI基础设施的硬仗。
消费者态度与市场发展动能
到2035年,大部分车真的会自己开吗?麦肯锡最新的调研显示,多数中国消费者是信的,但在西方,差不多只有四分之一的人这么看。不过,ADAS和自动驾驶确实在加速普及。一个挺明显的信号是,ADAS功能对购车决策的影响力越来越大——尤其是在高端车型上。
消费者也不排斥坐一辆没有司机的车。自动驾驶出租车(Robotaxi)市场正在快速增长,全球范围内,超过60%的受访消费者说会考虑用Robotaxi,将近一半的人觉得未来几年出行费用会下降。
但有意思的是,消费者对技术落地的预期,普遍比行业专家乐观。大多数自动驾驶领域的专家认为,到2035年,大众市场的主力还是L2+系统,L3及更高等级的系统可能还是在特定的场景和区域里跑。
L2+系统持续迭代,L4稳步推进,这会拉动全球ADAS软件和电子市场继续增长。预计这个市场年复合增速大概在16%左右,到2035年市场规模能到1600亿美元。其中,软件和域控制器(DCU)会占到最大的份额。
势头是不错,但自动驾驶想要规模化落地,还是有几道坎要翻。高成本和技术难题摆在那里。软件开发、安全验证、大规模数据采集,都是成本大头。向端到端AI架构转型,又进一步推高了对算力基础设施、仿真能力和高性能半导体的要求。2025年11月,一次针对40多位行业高管的非正式调研显示,ADAS落地的三大核心挑战分别是:安全保障(23%)、车载推理的高算力需求(14%)、监管与法律不确定性(14%)。
从规则驱动到端到端系统
过去十多年,ADAS和自动驾驶的发展主要靠规则驱动的软件架构——工程师们写几千条明确的指令,定义车辆在特定场景下该怎么反应。这套架构撑起了现在绝大多数安全和便利功能,从自动紧急制动到自适应巡航,也给更高等级的自动驾驶打了个底。但现在,行业正在经历一场深刻的架构变革。
有两股力量,正在加速端到端架构的普及:
第一,生成式AI。它大幅加快了ADAS和自动驾驶技术的迭代速度。传统系统依赖显式编程规则,或者只在局部场景用机器学习(比如交通标识检测)。端到端架构不一样,它是直接从大规模数据集里学怎么开车,对陌生场景的泛化能力更强,开起来也更接近人类司机的自然习惯。
第二,L4级自动驾驶的技术攻关,推动了生态内的跨领域协作。半导体企业、整车厂和出行运营商之间的合作越来越常见。多数落地项目采用分阶段模式:先靠数据采集车队攒真实的道路测试数据,然后在限定场景下用人工监督的方式验证系统性能,最后才实现完全的无人驾驶运营。这种协作正在重塑行业竞争的格局,也加速了技术迭代。
ADAS与自动驾驶的三类技术路线
目前,ADAS领域主要有三类架构,普遍结合了多模态视觉模型和强化学习/模仿学习技术。有的方案用一个模型同时处理感知、规划和控制任务,有的则用多个模型联合训练。
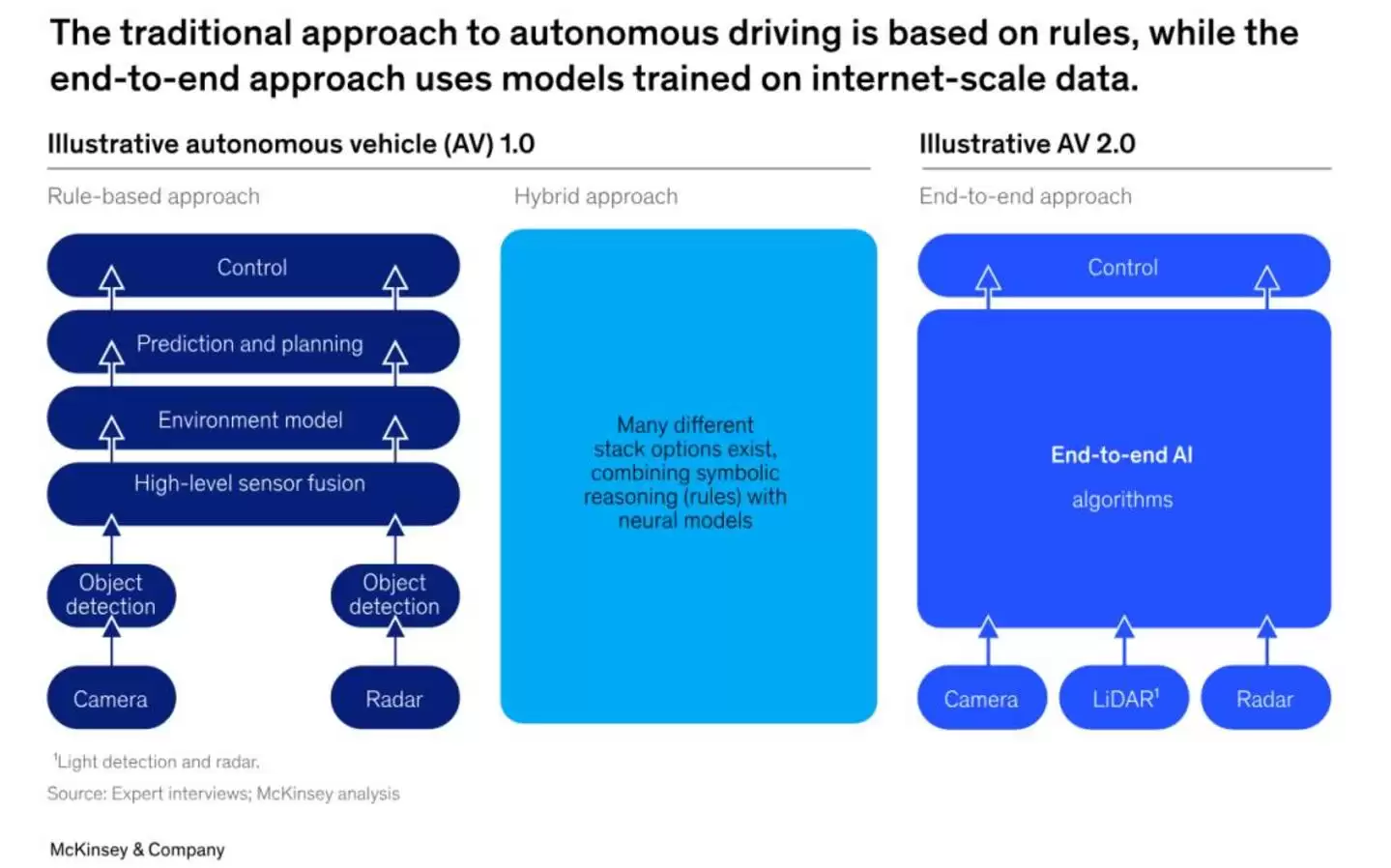
下面这两类架构,是从第一代自动驾驶技术的传统规则系统里长出来的:
第一类是传统ADAS(自动驾驶1.0)。它采用模块化流水线架构,把感知、规划、控制拆成独立的软件层级。绝大多数代码是人工写的,靠明确的“if-then”规则覆盖特定的驾驶场景(比如“检测到10米内有行人就刹车”),只在层级内部有限地用机器学习这类AI技术。
第二类是混合架构,把端到端学习和规则化的安全机制结合起来。通常用“视觉-语言-动作(VLA)”模型这类AI技术完成核心驾驶任务,同时额外用规则监控输出结果、约束安全边界。
端到端架构被认为是第二代自动驾驶技术(自动驾驶2.0)。它基于Transformer模型,靠互联网和车端生成的海量数据集训练,学习复杂的驾驶行为,实现多变场景下的泛化适配。
布局端到端自动驾驶的企业,并没有形成统一的设计共识,主要分两大技术路线:
第一个是模块化端到端设计。它把AI学习的性能优势和模块化工程的可解释性结合起来。不同的预训练模型分别承担感知、规划等功能,但这些模型在端到端的优化框架下联合训练。好处是中间输出可观测、可独立验证,降低了调试和安全分析的难度,开发者也能针对规划层用闭环仿真技术提升效率。短板是模块接口处会有信息损耗,在复杂的真实场景里泛化能力稍弱。
第二个是单一体架构设计。用一个模型同时完成感知和规划任务,有的方案甚至把车辆控制也包进去了。支持者认为,去掉模块接口能减少信息损耗,实现更强的泛化能力。但代价是技术复杂度大幅提升。单一体系统需要海量训练数据、庞大的算力资源和高度成熟的仿真环境,而且模型的决策过程通常不可直接观测,验证难度明显增加。
行业渐渐形成一个共识:在高度多变的驾驶环境里,端到端架构比传统系统表现更好,能处理工程师没有预先定义过的场景——这个能力在城市路况这种动态、模糊的环境里特别重要。
但优势背后也有核心难题:可解释性不足。跟模块化的规则系统不一样,端到端模型很多时候像个“黑箱”。工程师能看到系统的行为,却没办法完全解释它的决策逻辑。这给安全验证、问题排查和监管审批都带来了麻烦。
这些局限也影响着不同等级自动驾驶的规模化落地节奏。多数行业参与者认为,L2+系统的规模化速度会比完全自动驾驶快。L2+场景里,人类驾驶员还承担着监控责任,这降低了系统需要“完全安全”的证明压力。要想靠纯端到端算法实现L3、L4级规模化落地,需要多领域技术同步突破:数据效率更高的AI模型、能覆盖极端长尾场景的大规模仿真能力、更广泛的监管认可。而在端到端算法基础上叠加安全监控层的混合方案,可能有助于加速端到端模型在L3、L4车型里的落地应用。
同时,向AI原生端到端架构的转型,正在引发全行业算力需求的爆发式增长。半导体和车载计算平台,正成为核心竞争壁垒。
车载硬件和系统需求的新纪元
汽车半导体市场正在快速演进。几个核心趋势值得关注:GPU和NPU被广泛应用于AI工作负载;车载娱乐和ADAS应用对算力性能的要求在持续提升;融合型片上系统(SoC)和芯粒(Chiplet)这类新兴架构开始落地,它们能在单芯片上高效运行不同安全等级的多类应用,比如车载娱乐和ADAS。
预计ADAS/自动驾驶处理芯片的市场规模,将从2025年的大约56亿美元增长到2035年的460亿美元以上,年复合增速约24%。这个增速明显高于整体汽车半导体市场。它在汽车半导体市场里的价值占比,也会从2025年的不到6%提升到2035年的22%。全球各区域市场都会增长,其中大中华区预计在2035年成为全球最大市场。
这个高速增长的背后,是自动驾驶系统设计和部署的深层变革。随着行业从规则驱动的ADAS转向端到端的AI系统,车载算力需求急剧攀升。未来的系统需要实时处理海量多模态传感器数据流,同时在严格的时延和安全约束下持续运行大模型。单纯的算力峰值性能已经不再是唯一的核心指标了,NPU、内存带宽和先进封装技术,正在成为决定性的战略因素。
NPU和内存带宽的三大结构性趋势,正在驱动下一代车载算力升级:
第一,自动驾驶等级提升,高分辨率摄像头、雷达、激光雷达这些传感器用得越来越普遍,算力需求自然就大幅增长。等级越高的自动驾驶,对系统在毫秒级时间内处理更多数据、解读更复杂环境、运行更精密的规划算法的要求就越高。
第二,端到端架构的普及,从根本上改变了车载SoC内部的算力构成。早期ADAS架构里,GPU通常是感知工作负载的核心加速单元。但在端到端架构里,针对AI推理优化的NPU成了算力主体。CPU继续承担安全关键功能和系统整体调度,尤其是在满足汽车安全完整性等级(ASIL)合规要求的系统里。GPU和数字信号处理器(DSP)则转向辅助角色,负责前后置处理、可视化渲染,以及AI训练生态兼容等工作。
第三,行业在向集中式计算平台演进,一个平台可以同时承载ADAS、车载娱乐、车身控制等功能。这种架构降低了布线复杂度,提升了软件的可升级性,简化了OTA升级流程,也为车辆全生命周期内AI功能的灵活部署创造了空间。但它也带来了技术挑战:不同关键等级、时延要求、可靠性和安全标准的工作负载被整合到同一个平台上,所以可扩展架构和先进互联技术的重要性越来越突出。
目前主流的ADAS SoC,INT8算力通常在100~400 TOPS(每秒万亿次运算)。这些平台已经集成了CPU、GPU、NPU、DSP等异构计算单元。但随着AI工作负载的要求提升,架构的算力分配正在变化:新一代芯片会把更多的硅片面积留给NPU,而不是GPU,这对应着端到端系统里AI推理占比持续提升的趋势。CPU仍然负责安全关键功能、系统调度和冗余备份。
不过,原始算力性能已经不再是下一代ADAS系统的首要约束了。随着端到端架构运行的AI模型规模扩大、传感器数据流日益丰富,行业面临着一个新的挑战:怎么让海量数据在系统内部实时高效地传输。
端到端ADAS架构最显著的变化之一,是系统从“算力受限”转向了“内存受限”——这源于参数量扩大、高分辨率传感器数据流、庞大的中间激活层带来的压力。内存带宽(单位是GB/s)正在成为系统性能的决定性因素。高带宽的LPDDR内存和更大容量的片上SRAM缓存,已经变成了核心设计指标。同时,车辆也需要更大的非易失性存储空间,用来存更大的模型权重,支撑高频的软件更新。
这些需求对成本、散热设计和封装策略都产生了深远影响。高带宽内存和先进封装技术能缓解带宽约束,但也会推高成本和系统复杂度。现在,多数行业参与者认为,内存架构——而不是峰值算力——才是端到端自动驾驶规模化的核心瓶颈。
内存的重要性也延伸到了车端之外。AI需求激增正在引发存储芯片供应紧张。研究机构Omdia的数据显示,云厂商正在加速采购存储芯片,2025年服务器领域占据了超过50%的DRAM需求。2024到2025年,全球DRAM销售额的年复合增速大约在70%。
除了吞吐量,端到端系统还有另一项核心要求:确定性时延。ADAS和自动驾驶依赖实时控制闭环,从传感器输入到规划决策再到车辆控制输出,必须在严格可控、高度可预测的时间窗口内完成。执行时间的波动会直接影响安全。
这个要求提升了片上互联和低时延通信网络的重要性。其中,芯片间时延是端到端控制闭环的一大挑战。分布式架构具备灵活性和可扩展性,但会带来同步延迟和不可预测的行为,很难在安全关键系统里完成验证。
所以,确定性执行和时延可控,正成为下一代端到端自动驾驶平台的核心设计约束。多数场景下,高度集成的计算架构比分散式设计更有优势,因为它能最大限度降低通信开销,提升时序可预测性。
为何自动驾驶正成为AI基础设施挑战?
除了车端之外,AI原生端到端系统还需要庞大的数据中心算力来支撑。早期ADAS的模块化架构把感知、定位、预测、规划拆成了独立的软件栈,而端到端架构用统一的神经网络,直接把原始传感器输入映射成驾驶决策和车辆控制指令。
随着开发生命周期各阶段算力需求不断攀升,ADAS和自动驾驶的商业逻辑正在从传统的汽车工程模式,向超大规模的AI平台模式转变。
AI原生端到端系统的算力需求,主要由三大结构性力量推动:
首先,模型复杂度和内存密集度在提升。端到端系统依托规模更大、更精密的AI模型。Transformer架构、多模态基础模型、新兴的VLA系统需要实时处理海量高维传感器数据,同时完成环境解读、路径规划和车辆控制。高分辨率摄像头输入、3D占用网络、数十亿参数的神经网络,每一项都在向算力极限冲刺——既需要庞大的GPU集群完成训练,也需要高算力的车载中央计算机、超高内存带宽和先进的张量并行架构来支撑部署。
其次,训练数据规模激增。端到端模型要求开发者采集、存储、标注、处理海量的结构化和非结构化驾驶数据。这需要数百万小时的真实驾驶数据,来支撑模仿学习、强化学习、长尾场景挖掘和模型持续迭代。
第三,重仿真的验证模式。跟规则驱动的方案相比,端到端模型更像“黑箱”。企业必须运行海量高保真闭环仿真,生成合成长尾场景、评估失效模式、优化奖励函数,并持续重训练模型。
不过,并不是所有汽车参与者都会同等投入这场算力竞赛。行业正在清晰分化为“轻算力”和“重算力”两种运营模式:
多数传统整车厂选择轻算力模式,集成供应商的成熟技术栈。整车厂依托供应商提供的基础模型,只在内部完成有限的车型专属微调,内部算力需求相对可控。
自动驾驶出租车运营商和高度垂直整合的整车厂,则选择重算力战略,从零开始开发自研的端到端驾驶模型。这类企业需要庞大的专属算力基础设施,头部企业的AI训练总算力规模已经接近9万张H100等效GPU。
随着下一代AI翻跟斗落地,基础设施需求预计还会进一步攀升。更强的算力会支撑更复杂的VLA模型训练,以及L4自动驾驶所需的大规模端到端神经网络开发。
如今的端到端神经网络和VLA模型对算力要求极高,所以硬件和软件通常采用协同开发模式。如果使用碎片化的现成组件,很难实现L3、L4级自动驾驶所需的超低时延、高带宽和确定性安全。头部企业因此纷纷采用软硬件深度协同设计模式,或者为专属芯片定制开发软件。
尽管短期协同设计优势显著,但多数行业专家认为,市场的长期方向是软硬件解耦。不过,目前行业还没有形成明确的统一趋势。
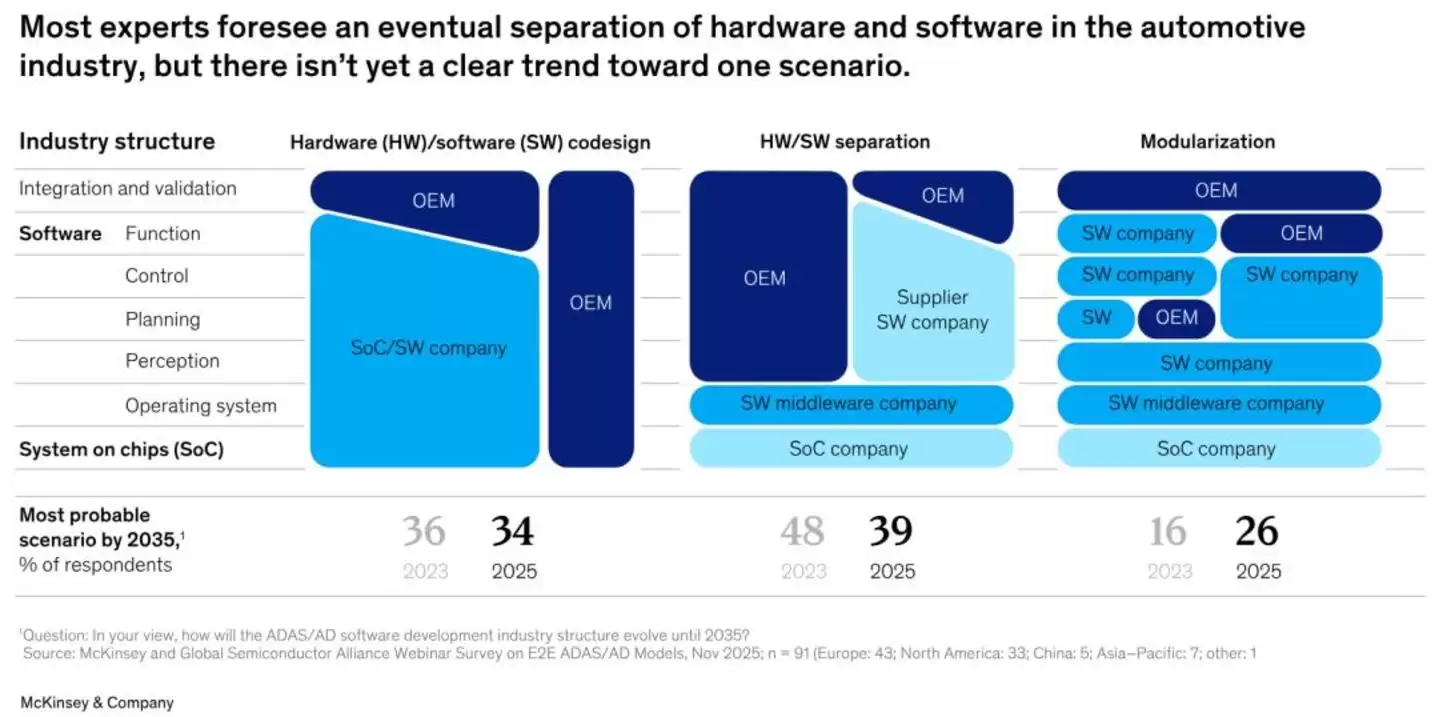
当前,多数SoC供应商提供软硬件一体化的集成方案,但它们普遍认为长期会走向更高程度的分离,以提升灵活性和安全验证效率。整车厂和一级供应商强调,需要感知、规划、控制等独立软件层,实现跨多类SoC平台的适配运行。半导体企业也在布局开放接口、中间件抽象层和标准化软件框架(比如基于POSIX的系统、自适应AUTOSAR)。这些都指向软硬件逐步分离的长期结构。
少数专家则认为,高性能自动驾驶仍然需要深度集成的端到端协同设计,尤其是在时延和优化要求极致的安全关键功能里。但即便支持深度集成的观点,也多将其视为一个过渡阶段——等标准和算力架构成熟了,终归还是会走向解耦。
第三种可能形成的格局,是模块化的“混搭”生态:不同厂商的优势软件模块,跑在标准化的硬件平台上。比如一家企业提供感知软件,另一家提供规划软件,再一家提供仿真或控制功能,通过通用的中间件层实现集成。但这个模式同样以软硬件一定程度的分离和标准化为前提。
端到端转型带来的一个直接影响,是芯片选型的决策环节后移了。车企越来越多地采用“软件优先”的思路:先选定ADAS软件合作伙伴,制定数据采集和标注策略,然后再确定半导体选型。
随着端到端架构日趋复杂,价值链协作不断深化,供应商关系也在发生变化。整车厂、一级供应商、半导体企业、云厂商、AI原生科技公司纷纷组建联合开发项目。通常由整车厂提供整车平台和专属驾驶数据,一级供应商负责系统集成和验证,AI平台企业输出基础模型、训练基础设施和仿真能力。
考虑到数据采集、模型训练、安全验证、高性能芯片开发的高额成本——尤其是城市场景系统——我们认为,技术栈各层级里,只有少数参与者能成功实现商业化落地。
与此同时,生态也向新入局者开放。端到端感知-控制模型的兴起,为AI原生初创企业、机器人公司、云厂商创造了切入汽车价值链的机会。它们可以作为基础驾驶模型供应商或训练基础设施服务商参与行业。
端到端转型也在加速整车厂的垂直整合。车企不再依赖现成半导体和供应商开发的ADAS软件,而是和芯片设计商、IP供应商、晶圆厂联合开发定制AI芯片,同时自研ADAS和自动驾驶软件。这反映了行业在向软件定义汽车的战略转型——硬件设计将围绕AI模型的需求展开。
半导体企业则在向软件领域延伸。头部SoC供应商纷纷推出集成软件栈,涵盖软件开发工具包、中间件、安全运行时。这个演变让半导体企业从单纯的组件供应商,转型为端到端的平台服务商。
下一个自动驾驶时代,既由车辆本身的进步塑造,也同样由AI、算力、半导体和超算基础设施的突破来定义。随着生成式AI加速行业向AI原生端到端系统转型,自动驾驶的领导权之争,将越来越取决于谁能打造行业最强的AI生态。那些成功把汽车领域经验,与软件、数据、算力领域的独特能力相结合的企业,终将定义出行的未来。


