
意法半导体解决方案重新定义机器人与家电电机控制
电机控制系统是现代自动化设备的“肌肉与神经”,它直接决定了工业机器人、AGV、家电等产品的运行精度、响应速度和整体稳定性。在这个领域里,有一个算法几乎无处不在——PID。作为闭环控制最经典的方案,PID一直是保障电机平稳精准运行的核心。
但说实话,传统PID有一个绕不开的软肋:它太依赖人工经验了。调参慢、适配差、抗扰能力弱、多工况下难以兼顾——这些问题在机器人和家电场景中尤其突出,长期困扰着一线工程师。而现在,AI技术正在给这位“老前辈”装上全新的引擎。
意法半导体将深度强化学习(DRL)算法与高性能硬件深度融合,推出了一款搭载AI驱动PID自整定的EtherCAT双电机伺服驱动器交钥匙方案。简单说,就是让PID调参这件事,从“靠人试”变成“AI自己学”,让电机控制更聪明、更高效、更稳定。
接下来,我们详细拆解这个方案:AI到底是怎么重构PID整定的?实测效果如何?以及它在机器人、家电等场景里,能带来哪些实实在在的价值?
ST EtherCAT双电机伺服驱动器:一站式交钥匙方案
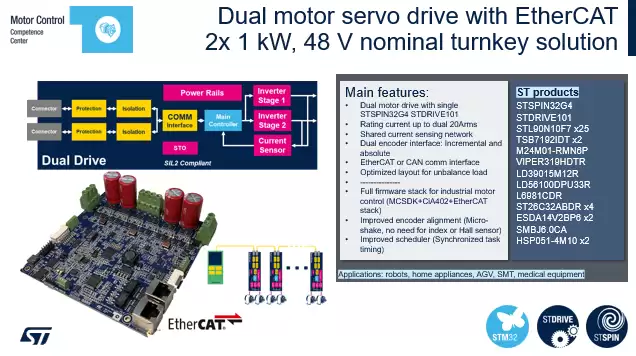
这是一个带有EtherCAT现场总线的双1kW/48V伺服电机驱动器方案,集成了高性能电机控制芯片、功率器件和通信接口,可以满足双电机协同控制的需求——安装调试完毕就能直接投入运行。主要特性包括:
双电机强劲性能
精准传感与通信
智能化硬件设计
此外,方案还提供了完整的固件栈,包括MCSDK、CiA402协议和EtherCAT协议栈,工程师不必从零开始构建固件,大大缩短开发周期。
ST完整电机控制生态:从工具到落地的全链路支持
意法半导体为电机控制打造了一站式图形化工具链,帮助用户从硬件搭建快速过渡到功能完备的应用开发。
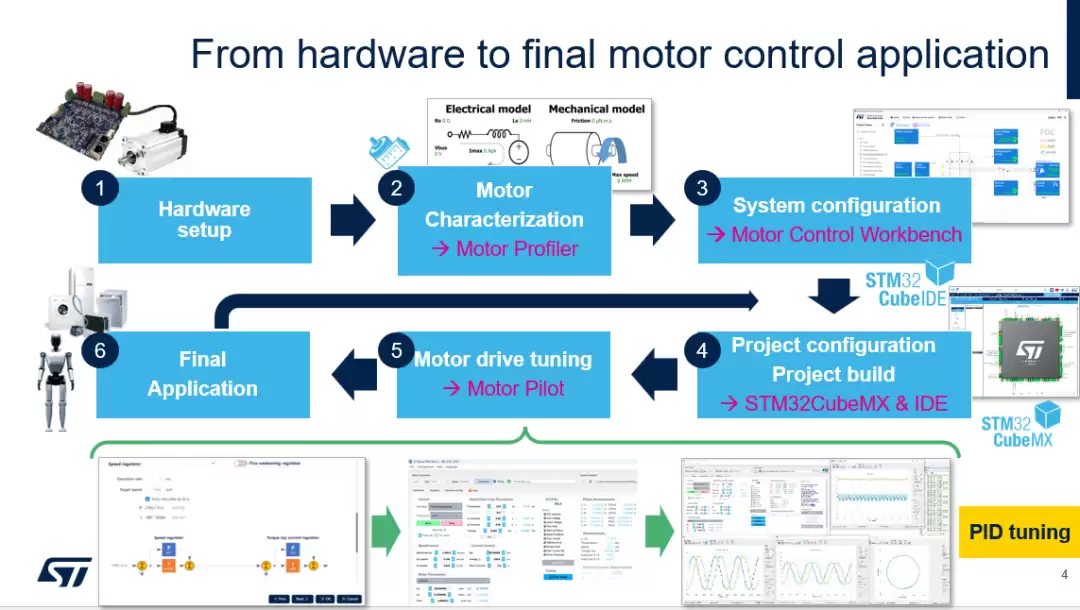
在整定PID之前,需要先摸清电机的基本参数。通过Motor Profiler可以识别出电气和机械参数,然后进入Motor Control Workbench,设定控制带宽,自动计算PID参数。但这里有个关键前提:参数可靠性完全取决于电机模型的准确性。
问题在于,实际应用中电机模型并不总是在理想条件下运行——负载会变,环境会变。这时就需要Motor Pilot登场了。它可以在真实测试环境下对PID参数进行微调,最终完成应用开发。整个流程对工程师的电机控制知识要求不低,所以PID整定至今仍是行业内相当有挑战性的工作。
机器人与家电电机控制:传统PID面临的核心痛点
机器人和家电的电机控制,对响应速度、稳定性和长期可靠性要求极高,而传统PID的调优存在几个绕不开的难题:
参数耦合与动态响应
具体到场景里——
在机器人控制中,很难找到一组参数同时满足“快速响应”和“稳定运行”;追求响应速度可能导致运动振荡,影响定位精度;注重稳定性则会导致响应滞后,拖慢作业效率。
在家用电器中,参数耦合同样会引发能耗增加、噪声变大,比如洗衣机脱水时因参数不当出现机身抖动。更让人头疼的是,PID参数调整特别耗时。
外部扰动与设备维护
而人工智能的出现,正在从根本上改变这个局面。
AI驱动PID智能整定:基于深度强化学习
本方案的核心思路,是利用深度强化学习实现PID参数的静态调优。与传统方法最大的不同在于,它引入了一个始终与环境交互的AI智能体。
强化学习的本质是“试错”法:智能体与环境交互,根据反馈的奖励信号不断调整行为策略,最终学习到最优的行为方式,实现奖励折扣总和最大化。简而言之,就是让AI自己摸索出最好的参数组合。
具体来说,AI智能体的控制策略(Policy)根据观察到的状态(State)生成动作(Action),也就是P、I、D三个参数。学习算法从环境中获取奖励,尝试更新策略,令其向最佳方向靠近。整个过程可以理解为:策略神经网络通过迭代更新,不断逼近最优解。
我们可以拿Google DeepMind训练人形机器人行走的例子来做类比:当机器人摔倒时,智能体会获得负奖励;当它稳定走出一段距离,就给予正奖励。通过不断试错,智能体学会了怎么走得更稳。
这个逻辑完全可以迁移到BLDC电机的PID调参上。BLDC电机的主要目标是实现理想的阶跃响应——也就是当电机切换速度时,多快能到达目标速度。如果PID参数不佳,响应速度会很慢,超调百分比高,振荡严重。当学习算法观测到这种状态时,会给出负奖励;下一步动作中,策略就会尝试更新PI参数,避开这组“坏参数”。
下图展示的是一个近乎完美的阶跃响应:响应速度快,几乎没有超调。这种响应会计算出高奖励,策略网络自然会更倾向于输出这组参数。
典型的电机控制环路是这样的:电机把位置、速度、扭矩反馈给PID算法,生成下一时刻的相电流。而在这里,P、I、D三个参数正是策略网络输出的Action,通过观察阶跃响应计算Reward,从而更新价值网络。图中绿色的部分是最核心的AI智能体,包含两个关键角色:Actor和Critic。
Actor网络根据观测到的状态生成下一步Action——也就是P、I、D参数。Critics网络接收下一时刻的观察,结合奖励来更新Actor。Actor可以看作策略网络,Critics则是价值网络。
值得一提的是,方案中使用的奖励是达速时间和超调百分比的加权平均。这其实和传统电机控制工程师手动调节PID参数的方法一脉相承,只不过我们把这一经验概念引入了AI领域。
上图展示了算法的关键成果。左图是AI在不同训练回合中如何探索PI空间:初始默认值在(20,1),然后逐步探索中间区域,最终向原点移动,找到了更新PI参数的正确方向。右图则展示了不同回合中的阶跃响应变化——可以看到,随着训练推进,响应曲线越来越理想。
结语
AI驱动的PID整定方案,相比传统手动整定,在调节速度、超调控制、稳态精度和抗扰动能力上都实现了质的飞跃。它成功破解了参数耦合、积分饱和、动态负载适配等行业长期难题,让电机控制真正迈入了全自主、自优化的智能新阶段。
意法半导体EtherCAT双电机伺服驱动系统,凭借高功率密度、高精度控制和同步任务调度等硬核特性,为AI智能调参提供了坚实的硬件底座。当强大的硬件遇上自适应的AI算法,二者深度协同,形成一套开箱即用的完整交钥匙方案,能够高效满足机器人、家用电器等场景的高端电机控制需求——这就是AI给机电控制领域带来的真正变革。




