
TIPSv2 – 谷歌 DeepMind 开源的多模态模型
来源:互联网
时间:2026-06-20 16:16:25
最近,多模态模型领域又迎来了一位重量级选手。来自Google DeepMind的TIPSv2,凭借一系列精巧的设计,在多个核心任务上刷新了记录。它到底解决了什么问题,又带来了哪些新思路?我们不妨深入看看。
简单来说,TIPSv2的核心目标,是让模型能够更精准地理解图像中每一个局部(Patch)与文本描述之间的关系。这个“密集对齐”的能力,正是实现高质量零样本语义分割等任务的关键。为此,团队引入了三大技术创新。
TIPSv2的主要功能
这个模型的能力相当全面,几乎覆盖了当前视觉-语言理解的主流需求:
- :无需任何额外训练,直接根据一句文本描述(比如“一只坐在沙发上的猫”),就能在图像中精确勾勒出对应物体的边界。
零样本语义分割
- :支持双向搜索,既能用文字找到匹配的图片,也能用图片检索出相关的文字描述。
图像-文本检索
- :在ImageNet这类标准数据集上,直接通过匹配文本嵌入就能完成分类,省去了繁琐的微调步骤。
零样本图像分类
- :利用其强大的Patch级特征,还能估计出场景的几何信息,比如物体的远近和表面朝向。
深度与法向量预测
- :上传一张图片,可以生成Patch嵌入的PCA特征图,让你直观地“看见”模型是如何理解图像不同区域的。
特征可视化
TIPSv2的技术原理
实现上述强大功能的背后,是几个关键的技术突破:
- :这是对原有iBOT方法的升级。它将Patch级别的自蒸馏损失扩展到了所有token(包括可见token),强制学生模型去对齐教师模型的所有Patch表示。这一招效果显著,在ADE150数据集上的零样本分割指标直接提升了14.1个mIoU。
iBOT++
- :为了提升训练效率,团队想了个巧妙的办法——只对模型最后的投影头(Projection Head)应用指数移动平均(EMA),而主干网络则不用。这一下子就减少了42%需要EMA更新的参数,大幅降低了内存开销。
Head-only EMA
- :文本描述的质量至关重要。TIPSv2同时利用了PaliGemma模型生成密集的局部区域字幕,以及Gemini Flash模型生成全局的深度描述。在训练时,这两种不同粒度的文本会随机交替使用,从而极大地提升了模型对多样化描述的鲁棒性。
多粒度文本增强
- :模型并非“单腿走路”,而是同时接收文本监督信号和自监督信号。这种联合训练的策略,成功解锁了底层网络进行密集图文对齐的能力。
对比学习与自监督联合训练
TIPSv2的关键信息和使用要求
如果你对动手尝试感兴趣,这里有一些基本信息:
- :来自Google DeepMind,论文的通讯作者是Bingyi Cao、Koert Chen和André Araujo。
研发团队
- :这次开源非常彻底,涵盖了从8600万到11亿参数的四种规格的模型权重,同时提供了PyTorch和JAX/Scenic双框架的代码。此外,HuggingFace上的在线Demo和Colab Notebook也都准备好了。
开源范围
- :需要Python 3.11,并可以选择PyTorch或JAX/Scenic作为后端。
运行环境
- :核心库包括torch、torchvision、tensorflow_text和scikit-learn等。
依赖安装
TIPSv2的核心优势
与现有的同类模型相比,TIPSv2的亮点确实不少:
- :其零样本分割能力在ADE150、PASCAL VOC等四个主流基准测试中全面领先。最关键的是,它不需要复杂的后处理协议,直接最大化余弦相似度就能获得更高的mIoU,流程简洁高效。
Patch-文本对齐能力达到新高度
- :这要归功于前面提到的Head-only EMA策略,节省了大量训练内存。更有意思的是,通过蒸馏,较小的TIPSv2模型甚至在密集对齐任务上能反超更大的教师模型。
极致的参数效率
- :数据很有说服力。参数量更少、训练数据也更少的TIPSv2-g,在5项评测中的3项上,击败了参数量多56%、数据量多47倍的PE-core模型。而TIPSv2-L则在6项评测中的4项上,胜过了参数多6倍、数据多15倍的DINOv3-L。
训练性价比突出
- :它没有明显的短板,在密集对齐(分割)、全局对齐(检索/分类)以及纯视觉任务(深度/法向量估计)上表现都很均衡,在9项任务、20个数据集上都有竞争力。
通用性覆盖三大维度
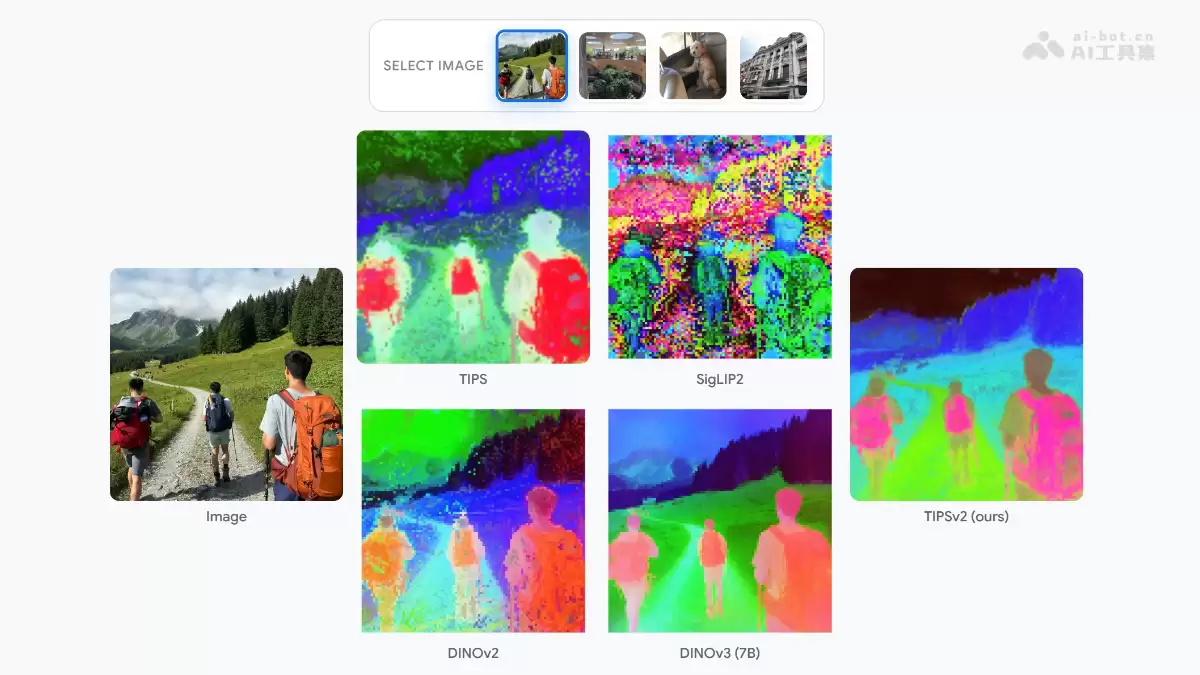
- :通过PCA可视化对比可以发现,它的Patch嵌入比SigLIP2、DINOv3等模型的结果更平滑,物体边界和语义细节保留得更加完整。
特征语义清晰
TIPSv2的项目地址
所有相关资源都可以在以下地址找到:
- :https://gdm-tipsv2.github.io/
项目官网
- :https://github.com/google-deepmind/tips
GitHub仓库
- :https://huggingface.co/collections/google/tipsv2
HuggingFace模型库
- :https://arxiv.org/pdf/2604.12012
arXiv技术论文
TIPSv2的同类竞品对比
| 维度 | TIPSv2 | DINOv3 | SILC |
|---|---|---|---|
机构 |
Google DeepMind | Meta | 多机构 |
核心机制 |
iBOT++ + 对比学习 + 多粒度 Caption | 纯自监督(DINO + iBOT) | 对比学习 + 掩码语言 |
文本监督 |
多粒度合成 Caption | 无 | 单粒度 |
零样本分割 |
直接余弦相似度,无需后处理 |
需滑动窗口协议辅助 | 依赖 TCL 滑动窗口协议 |
参数效率 |
高 |
低(全模型 EMA,大数据量) | 中等 |
Patch-文本对齐 |
SOTA |
弱(无文本对齐) | 较强但需复杂协议 |
TIPSv2的应用场景
凭借其强大的零样本理解和密集对齐能力,TIPSv2在多个领域都有用武之地:
- :实时理解复杂道路场景,通过文本指令零样本分割出障碍物、可通行区域等,无需为每一个新出现的物体类别重新训练模型。
自动驾驶
- :强大的图像-文本双向检索能力,可以精准实现以文搜图、以图搜文,为商品推荐和违规内容识别提供支持。
电商与内容审核
- :医生只需输入自然语言描述(如“左肺下叶的结节”),模型就能辅助定位病灶区域,这有望大幅降低专业医学图像标注和模型训练的成本。
医学影像分析
- :让机器人理解“请拿起那个红色的杯子”这样的指令,并准确在环境中进行视觉定位和操作。
机器人视觉导航
- :其提供的PCA特征可视化工具,为研究人员探索视觉-语言模型的内部感知机制,提供了直观的窗口。
科研与模型可解释性




