
Qwen-Robot Suite – 阿里通义推出的物理世界智能基础模型套件
Qwen-Robot Suite是什么
先说说这东西到底是什么。
Qwen-Robot Suite
物理世界基础模型套件
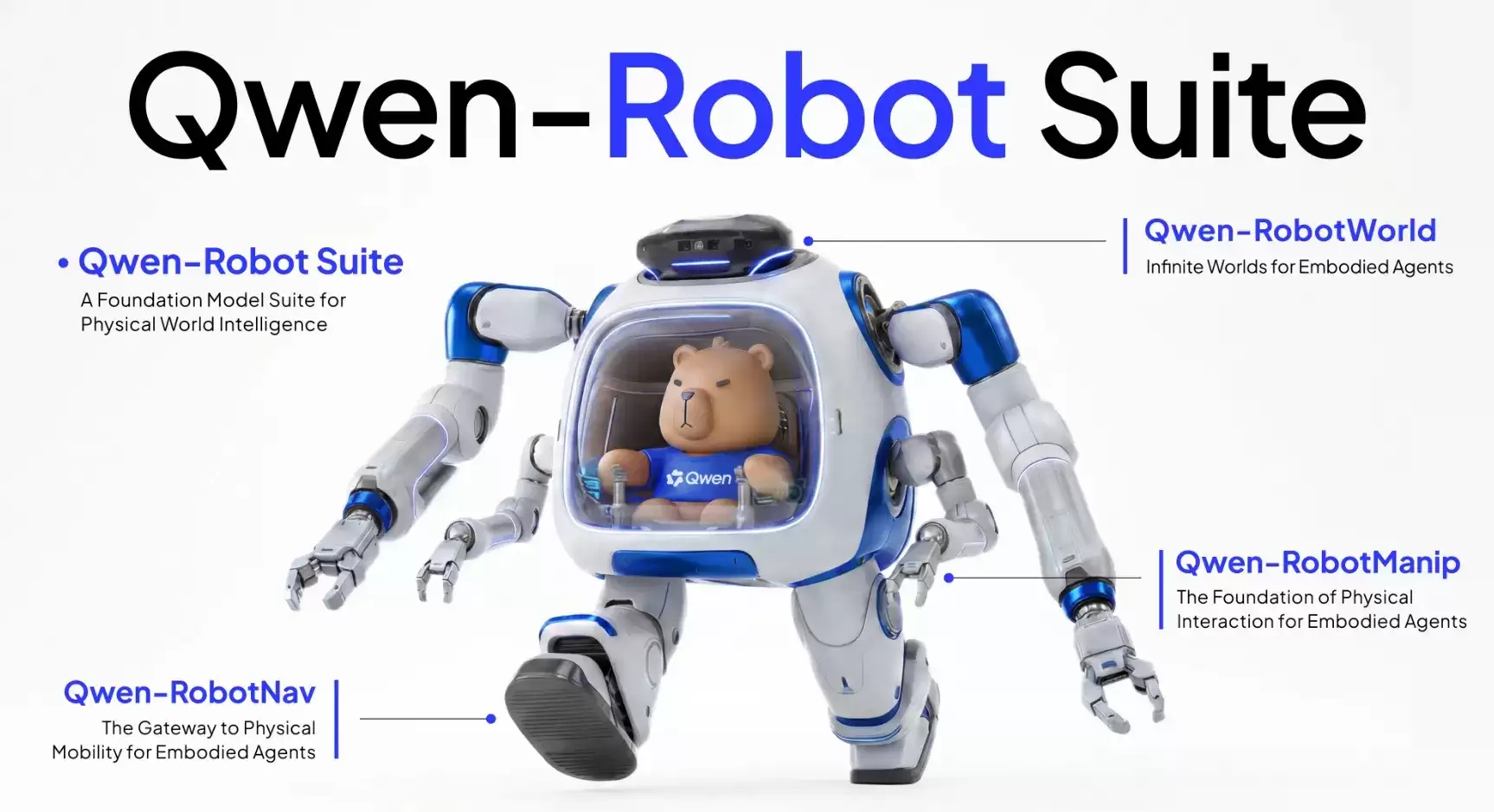
- Qwen-Robot Suite(通义机器人基础模型套件)
工具名称:
- 阿里巴巴通义实验室(Qwen Team)
开发公司:
- 2026年6月
发布时间:
- 机器人导航、机器人操作控制、世界动态预测、智能体工具调用
主要功能:
- 语言优先接口、跨本体统一表示、多模态世界建模、长程任务规划
技术特点:
- 模型部署、机器人集成、智能体框架调用
使用方式:
- 官方暂未公布商业化定价方案
价格说明:
- 机器人研发团队、具身智能企业、科研机构、AI开发者
适用人群:
Qwen-Robot Suite的核心优势
这部分的亮点在哪呢?几个方向可以聊一聊。
- 说到底,这套模型最让人眼前一亮的,就是三个模块全部用自然语言作为统一接口。过去搞机器人开发,导航要学导航协议,操作要学控制协议,世界模型又是另外一套逻辑。现在不用了,语言指令打通一切,开发复杂度直线下降。
统一语言接口:
- Qwen-RobotManip用的是统一80维状态动作表示,单臂、双臂、灵巧手、移动平台,甚至混着来,都能搞定。在RoboTwin-XE测评里,零样本跨本体迁移能力比之前最好的方案提升了大约3倍。
跨机器人泛化能力:
- Qwen-RobotNa v一个模型搞定指令跟随、目标搜索、目标追踪、自动驾驶和具身问答。以前不同场景要维护不同模型,现在一个就够了,部署和维护成本自然就降下来了。
导航能力覆盖广:
- Qwen-RobotWorld不光能预测未来画面,关键是它预测得符合物理规律。重力、碰撞、物体运动关系,都拿捏得比较准。在WorldModelBench和PBBench这类世界模型评测里,它是开源模型里排名第一的。
物理规律一致性强:
- 这三个模型都能被上层大模型当成工具调用。比如Qwen模型负责规划任务步骤,RobotNa v负责移动,RobotManip负责执行动作,RobotWorld负责预测结果——整个任务闭环就这么连起来了。
适合构建智能体系统:
Qwen-Robot Suite的主要功能
功能上,这套模型覆盖了机器人本体从移动到操作再到预测的完整链条。
- Qwen-RobotNa v能干指令跟随、目标导航、目标搜索和自动驾驶这些活儿。开发者只要输入自然语言目标,模型自动生成导航行为。仓储机器人、巡检机器人、服务机器人,都适用。
统一导航控制:
- Qwen-RobotManip负责机械臂和移动平台的操作任务。视觉输入加语言指令,模型就能执行抓取、整理、搬运这些动作,实现了从“看到”到“做到”的直接映射。
机器人操作控制:
- Qwen-RobotWorld可以根据当前场景和动作描述,预测未来状态。比如输入“拿起杯子放到桌面”,它能预测执行完后的视觉结果。这用在规划和仿真里,价值很大。
世界状态预测:
- 系统能把复杂任务自动拆解。比如“整理桌面”会被拆成识别物体、规划顺序、抓取物品、摆放归位等多个小步骤,复杂场景下成功率提升明显。
长程任务执行:
- Qwen-RobotNa v已经在Unitree Go2四足机器人上实现了零样本部署。不用针对特定环境重新训练,直接上手跑真实环境导航任务。
开放环境部署:
- 三个模型都能作为智能体工具模块接入,让通用大模型获得物理行动能力。从语言推理到现实执行,这个能力扩展的意义不小。
智能体工具调用:
如何使用Qwen-Robot Suite
上手流程其实不复杂,按下面几步来就好。
- 先别急着上手,先搞清楚自己到底要做什么。需要机器人移动?选RobotNa v。需要机械臂执行动作?选RobotManip。需要预测未来状态?选RobotWorld。难度:简单。
步骤一:确定任务类型:
- 把模型接入机器人控制系统或仿真环境,配置好相机、传感器和执行器接口。稳妥起见,建议先在这仿真环境里验证模型输出结果。难度:需注意。
步骤二:接入机器人平台:
- 用文字描述任务目标,比如“找到红色杯子并放到架子上”。模型会自动解析需求并生成动作规划。难度:简单。
步骤三:输入自然语言指令:
- 根据机器人硬件能力调整视觉输入、观测频率和控制参数。新手可以先采用默认方案,通常够用。难度:需注意。
步骤四:配置执行参数:
- 模型输出导航路径、操作动作或预测结果后,机器人开始干活。执行过程中可以实时监控,必要时人工干预。难度:简单。
步骤五:执行并监控结果:
- 任务复杂的话,可以让Qwen这类大模型做规划器,把长任务拆解成多个子任务,再调用Qwen-Robot Suite逐步搞定。这一步建议有经验的人操作。难度:建议有经验者。
步骤六:结合智能体框架:
Qwen-Robot Suite的应用场景
从家庭到工厂,这套模型能落地的场景很多。
- 家庭机器人用RobotManip能搞定桌面整理、衣物收纳、简单搬运。用户只需发出自然语言指令,系统自动规划并执行。
家庭服务机器人:
- 仓库里用RobotNa v做货架搜索、路径规划、货物定位。相比传统规则系统,它能适应更复杂的开放环境。
仓储物流自动化:
- 制造企业可以用RobotManip实现不同机械臂之间的技能迁移,设备更换时不需要重新编程和重新标注数据,省下了不少成本。
工业机器人协作:
- RobotNa v覆盖了自动驾驶的能力,园区巡检、配送机器人、无人驾驶研究场景都能用,统一导航控制。
自动驾驶与巡检:
- RobotWorld能生成符合物理规律的未来场景,用于训练数据生成、策略验证和仿真环境扩展,大幅降低真实数据采集成本。
机器人仿真训练:
Qwen-Robot Suite的价格与付费方案
截至目前,官方还没有公布正式商业化定价方案。从现有信息看,项目主要瞄准科研机构、机器人企业和开发团队。
Qwen-Robot Suite的官方相关文档
- Qwen-Robot Suite:迈向物理世界智能的基础模型套件
- Qwen-RobotManip:对齐先行,规模化通用机器人操作基础模型
- Qwen-RobotNa v:面向智能体驱动的规模化通用导航模型
- Qwen-RobotWorld:无界世界,赋能具身智能体
使用Qwen-Robot Suite时需要注意的问题
需要强调的是,Qwen-Robot Suite不是面向普通用户的消费级AI工具,而是机器人研发基础模型。要顺利使用,需要具备机器人控制、视觉感知或智能体开发的相关知识。模型虽然表现出不错的泛化能力,但复杂物理环境下仍可能出现执行误差。涉及真实设备控制的场景,安全保护和人工监控必须到位,避免因动作失误造成设备或环境损坏。
和其他 AI 工具相比,Qwen-Robot Suite有哪些差异?
| 对比维度 | Qwen-Robot Suite | π0.5 | OpenVLA |
|---|---|---|---|
| 核心定位 | 导航+操作+世界模型 | 通用机器人控制 | 视觉语言动作模型 |
| 易用性 | 统一语言接口 | 偏研究导向 | 需要开发经验 |
| 跨本体能力 | 支持15+平台 | 较强 | 有限 |
| 世界模型 | 支持 | 不完整 | 不支持 |
| 长程任务 | 支持智能体组合 | 依赖外部系统 | 能力有限 |
| 适用场景 | 具身智能系统 | 机器人研究 | 学术研究 |
从定位上看,Qwen-Robot Suite走的不是单点突破路线,而是搭建了一套由导航、操作和世界模型组成的完整体系。相比OpenVLA,它更强调系统能力;相比π0.5,它更强调跨本体泛化和智能体集成。对于需要构建复杂机器人系统的团队来说,这种工具化设计扩展性更强。当然,如果只是做单任务控制,其他专用模型可能部署起来更简单。
关于Qwen-Robot Suite的常见问题
Qwen-Robot Suite是什么?
Qwen-Robot Suite是什么?
阿里通义推出的机器人基础模型套件,由RobotNa v、RobotManip和RobotWorld三个模型组成,覆盖导航、操作和世界预测能力。
Qwen-Robot Suite怎么用?
Qwen-Robot Suite怎么用?
通过机器人平台或智能体系统接入使用,根据任务类型选择对应模块,再用自然语言指令驱动模型执行任务。
Qwen-Robot Suite免费吗?
Qwen-Robot Suite免费吗?
截至目前官方尚未公布商业化收费方案,最终定价模式需要关注后续官方公告。
Qwen-Robot Suite适合普通用户吗?
Qwen-Robot Suite适合普通用户吗?
不太合适。这玩意儿瞄准的是机器人研发人员、科研机构和企业开发团队,需要一定技术基础才能完成部署和集成。
Qwen-Robot Suite支持哪些机器人?
Qwen-Robot Suite支持哪些机器人?
官方资料显示训练目标覆盖15个以上机器人平台和20余种机器人本体,包括机械臂和移动机器人。
Qwen-Robot Suite和OpenVLA哪个好?
Qwen-Robot Suite和OpenVLA哪个好?
OpenVLA更专注视觉语言动作模型,而Qwen-Robot Suite同时包含导航和世界模型能力,更适合构建完整具身智能系统。
Qwen-Robot Suite效果如何?
Qwen-Robot Suite效果如何?
官方公开数据显示,RobotNa v、RobotManip和RobotWorld均在多个公开基准测试取得领先成绩,并展示过真实环境零样本部署的能力。




