
智驾人才,怎么在具身领域失宠了?
一代人的成功经验,正在悄然失效。
过去两年,具身智能行业几乎是把自动驾驶的人才、方法论和组织经验,一股脑儿地全盘接收。
然而到了今年,越来越多从业者意识到,自动驾驶和具身智能之间,或许永远隔着一条无法弥合的鸿沟。
最近半年,我先后和不少具身智能创业者、机器人产业的人聊过一个核心问题:招人还会优先看智驾背景吗?
答案,开始趋向一致。
智驾光环,正在褪色
春节前后,就有猎头透露,一些机器人公司对跨行业候选人的面试概率明显下降,明确优先倾向有机器人行业经历的人。
智驾背景当然不至于成为减分项,但它曾经那种天然的光环,已经不复存在。
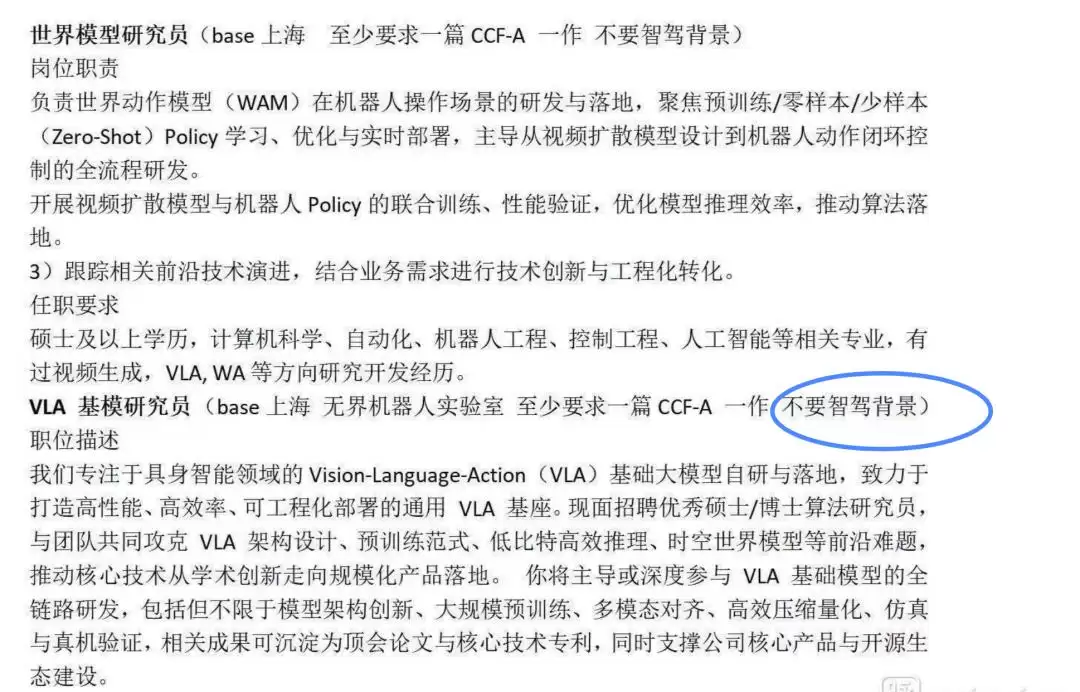
前些天,一家从头部智驾公司单独分拆出来做具身的企业,在招聘世界模型研究员时,直接在岗位要求里写下了“不要智驾背景”几个字。
更有意思的是,前不久去采访一家工业机器人公司的CEO,聊到人才招聘时,他直言,团队现在基本不考虑招纯自动驾驶背景的人。
我下意识追问了一句:“可您自己不也是从自动驾驶出来的吗?”
他笑着回了一句:“具身是个新行业,真要靠老经验,基本就黄了。”
他解释说,之所以不优先考虑智驾背景,是因为自动驾驶和具身智能虽然在表面看起来相近,但底层逻辑已经完全不同。
这句话,听起来有些反常识。
毕竟过去两年,无论是VLA、世界模型,还是端到端、数据闭环,很多自动驾驶公司都在积极拥抱AI新范式。从技术栈上看,两者共享着大量底层能力,所有人都理所当然地认为:智驾转机器人,是降维打击,是顺理成章。
可越来越多真正走进这个领域的人开始承认:最初把两者看得太像了。自动驾驶的问题复杂度,其实远低于具身智能。
自动驾驶固然复杂,但它本质上是在一个高度约束的环境中解决问题——
道路是固定的,交通规则是明确的,车辆形态是统一的,绝大多数变量都位于一个相对可定义的框架内。
而机器人面对的是开放的物理世界,几乎要把人与物理世界所有可能的交互关系都囊括进来。拧螺丝、上料、分拣、装配、搬运、整理——每一个动作背后,都可能对应另一套数据、另一套训练和另一套部署方式。
这也可能是两者最核心的分野:
自动驾驶没有“下游任务”这个概念。你不会造一辆只开北京五环的车,也不会让一辆车只学上海外环的路况。它追求的是一个大一统的、能适配所有道路场景的通用解法。
而机器人的本质就是任务的集合。今天没有任何一个机器人模型能通吃所有工业场景,更别提家庭场景。预训练、后训练、场景微调、小样本学习……这套看似繁琐的流程,恰恰是机器人行业的常态。
而这,对于长期在自动驾驶体系里成长起来的人来说,是最难适应的地方。
经验,正在变成负资产
自动驾驶行业发展了十几年,已经形成了一套极其成熟、经过无数次验证的方法论。
这套体系培养出了一大批懂量产、懂工程、懂系统架构、懂数据闭环的优秀工程师,这些能力放在任何高科技行业都是千金难求的资产。
事实上,今天具身智能行业最顶尖的一批创业者,绝大多数依然来自自动驾驶。
但问题的关键不在于经验有没有价值,而在于经验什么时候会变成负担。
长期在智驾体系里成长的工程师,很容易形成强烈的路径依赖:他们习惯于寻找统一解法,习惯于搭建通用框架,习惯于用过去已经验证成功的方法来解释和解决新问题。
这就导致一个尴尬的现象:手里的锤子太重,看什么都像钉子。
但具身智能,很多时候并不奖励这种思维。甚至某种程度上,它会惩罚这种思维。
因为机器人行业今天最大的特点,就是几乎所有事情都没有标准答案。
不少创业者私下都说过类似的话:现在看人,最在意的既不是做没做过机器人,也不是做没做过自动驾驶,而是这个人能不能快速理解一个全新的问题。
一位具身创业者曾说过一句非常有意思的话:
“如果今天有两个人,一个做过五年自动驾驶,一个刚从AI研究转过来,我未必一定选前者。”
原因很简单:智驾背景代表你过去解决过很多确定的问题,而机器人行业更需要的是,面对未知时敢于清零、愿意重新开始的能力。
这让我想起十年前自动驾驶刚兴起时,行业里流行过一句一模一样的话:自动驾驶,反而不优先招车辆工程专业的人。
具身,需要另一种人
那么,今天的具身智能公司,到底在抢什么样的人?综合过去几个月数十位行业人士的观点,可以总结出四条核心标准:
第一:得做过AI。
第二:没有太重的历史包袱。
第三:扎实的数学和抽象能力。
第四:也是最重要的,愿意接受新事物,愿意重新学习。
这也解释了为什么现在不少具身公司一边还在吸纳智驾人才,一边又开始对智驾背景保持更高的警惕。
他们并非排斥自动驾驶出身的人,而是排斥被自动驾驶方法论绑得太紧的人。
当然,不能否认自动驾驶对具身智能行业做出的巨大贡献。它不仅输送了第一批人才和资金,更重要的是,它验证了AI+物理世界这条道路的可行性。
但自动驾驶和具身智能的复杂度,在很大程度上终究无法共情。
智驾的难点更多集中在决策层面,控制体系经过几十年发展已经相当成熟;而机器人的控制本身至今没有完全解决,决策空间又比智驾大了几个数量级,再加上从语言到动作这道至今未被跨越的鸿沟,难度呈指数级上升。
自动驾驶需要接近100分才能合法落地,差一分都可能酿成大祸;而具身智能可能60分、甚至40分就有机会进入场景——一个家务机器人哪怕偶尔弄坏一个杯子,和一辆自动驾驶车的事故风险,完全不是一个量级。
自动驾驶有L2这个完美的过渡阶段,可以一边赚钱一边迭代;而具身智能没有中间态,它要么能真正替代人完成任务(L4),要么就是个玩具(L0)。
坦白说,自动驾驶创业交过的所有学费,具身智能创业大概率还要再交一遍。即便有少数人真的站在巨人的肩膀上看得更远,大多数人还是会在同一个坑里摔倒。
今天的具身智能,已经在机器人学习范式上拿到了一些阶段性突破,但离真正像自动驾驶那样,系统性替代物理世界中的人效,还差得很远很远。那条路,不会短。
而对个体来说,选择已经变得无比现实:
具身开着更高的工资,站在离资本最近的风口,生态位也正在快速形成。这让我突然想起前几天和一个刚从智驾转去具身的工程师聊天,他半开玩笑地说:“先在这边赚几年快钱,等具身这行不行了,我再转回去呗。”
“坑位渐满,早点入场。”




