宇树G1又炫技,脚踩梅花桩如履平地,网友:疑似少林寺训练内容流出
这项突破来自上海AI实验室、上海交通大学、浙江大学、香港大学和香港中文大学的联合团队。他们发布了一个名为BeamDojo的强化学习框架,核心目标是:让人形机器人在落脚点稀疏、危险系数极高的地形上,实现精细的落脚点控制。这项技术,据说是第一个基于学习方法能做到这一点的成果。
那么,难点到底在哪?
在人形机器人的世界里,走平衡木、踏梅花桩这类活儿,远没有看起来那么简单。机器人必须极其精准地处理感知信息,把脚放在安全区域,同时保持躯干稳定——稍有偏差,可能就狼狈跌下。这背后有两个主要的技术障碍。
第一,四足机器人虽然已经很擅长在稀疏落脚点上行走了,但它们的脚多是点状,而人形机器人的脚是多边形。为点状脚设计的落脚点奖励机制,直接套用在多边形脚上,完全不适用。第二,目前的基于学习的人形机器人研究,在复杂地形与精细落脚点的灵活运动方面,奖励信号非常稀疏,学习效率极低,难以获取可靠的感知信息。
于是,BeamDojo应运而生。这个框架专为这类“危险地形”量身打造,让G1机器人在稀疏落脚点上灵活穿行。
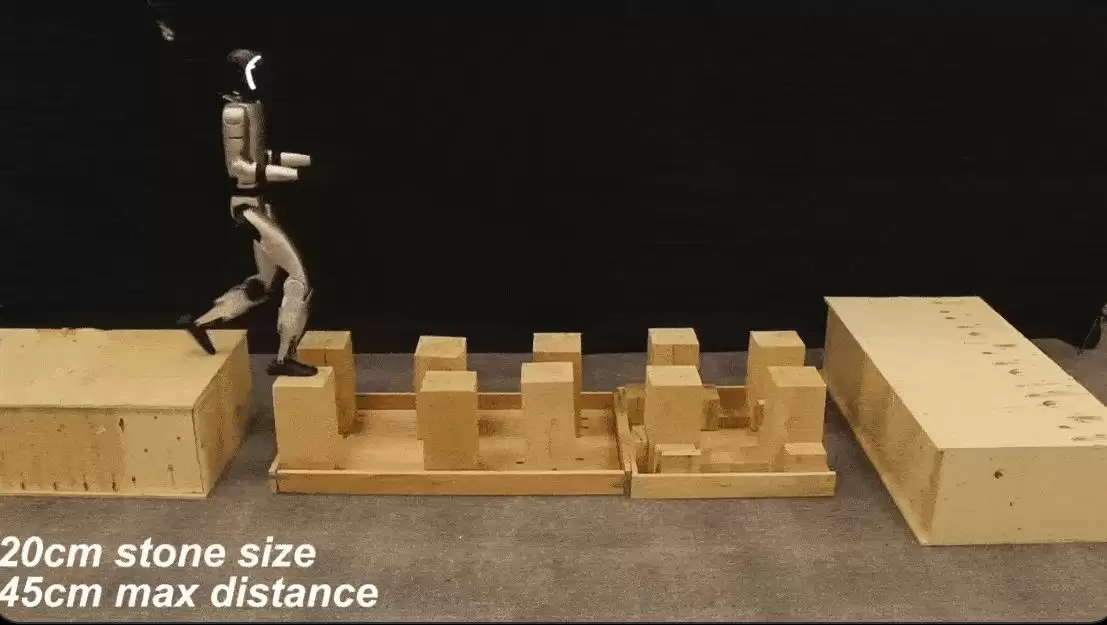
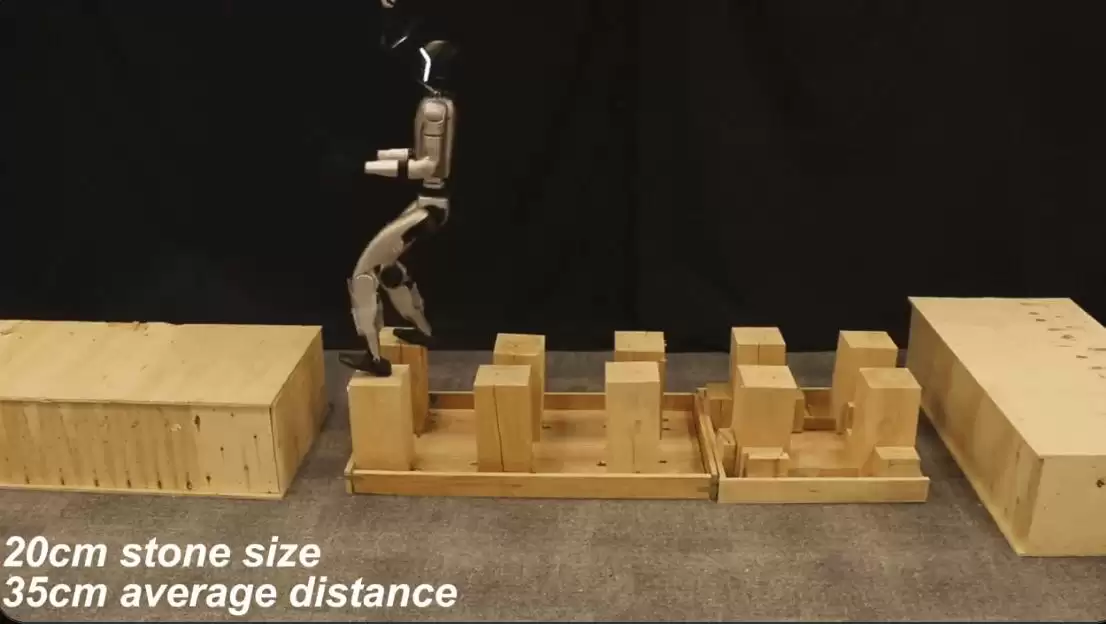
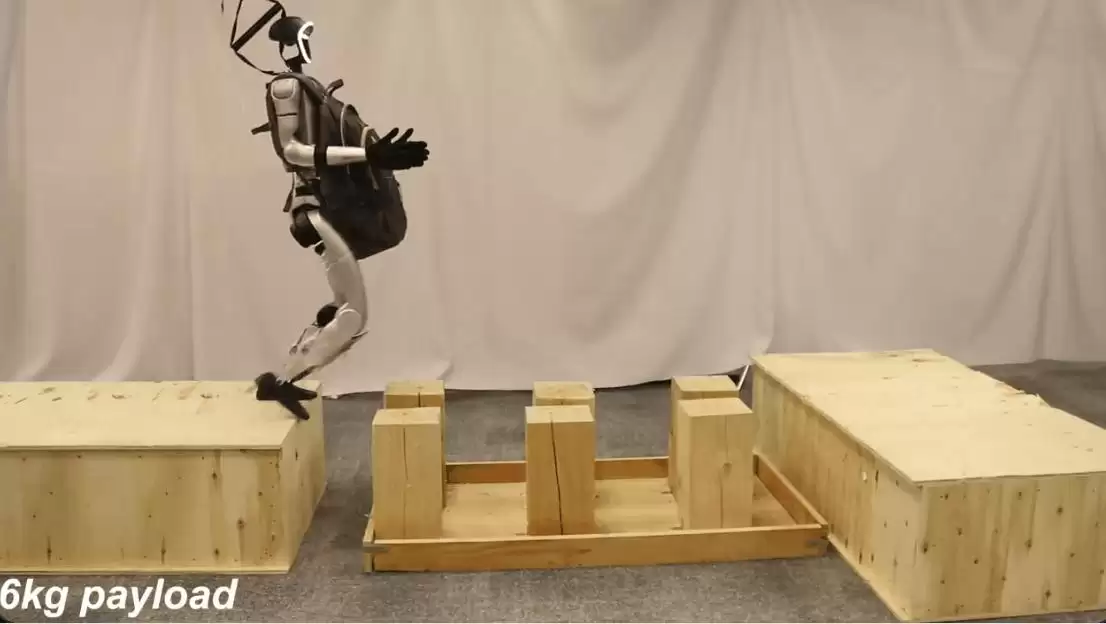
演示画面中,G1可以稳定地穿越多个面积十分狭小、约20厘米宽、间距不一的踏脚石——活脱脱一个现代版梅花桩。更让人惊讶的是,它甚至能倒退着完成这个挑战。
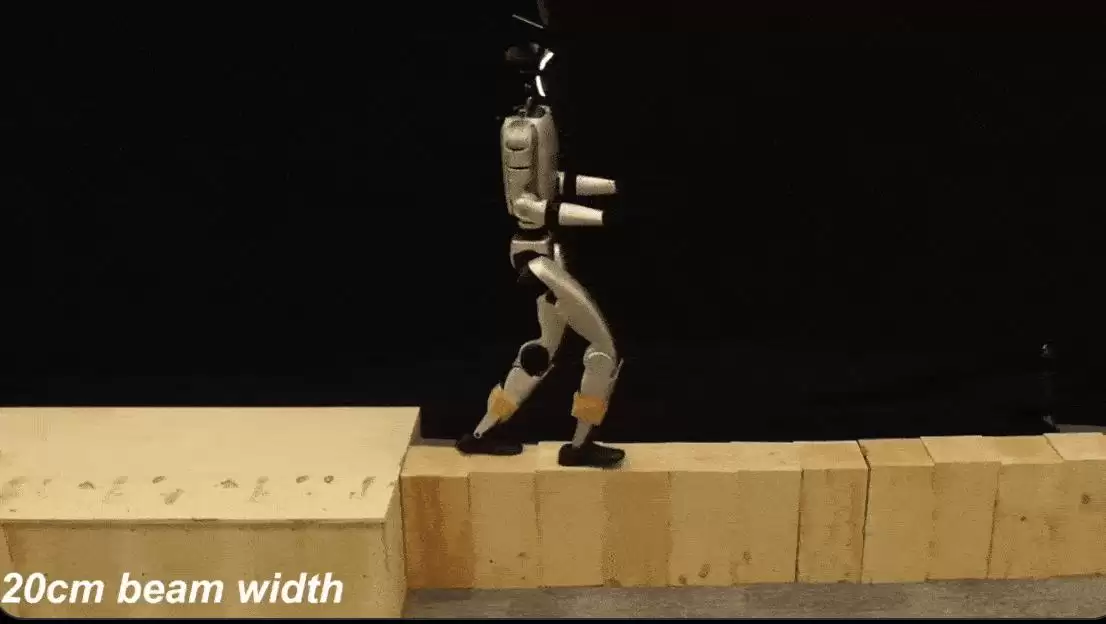
20厘米宽的平衡木?当然也不在话下。
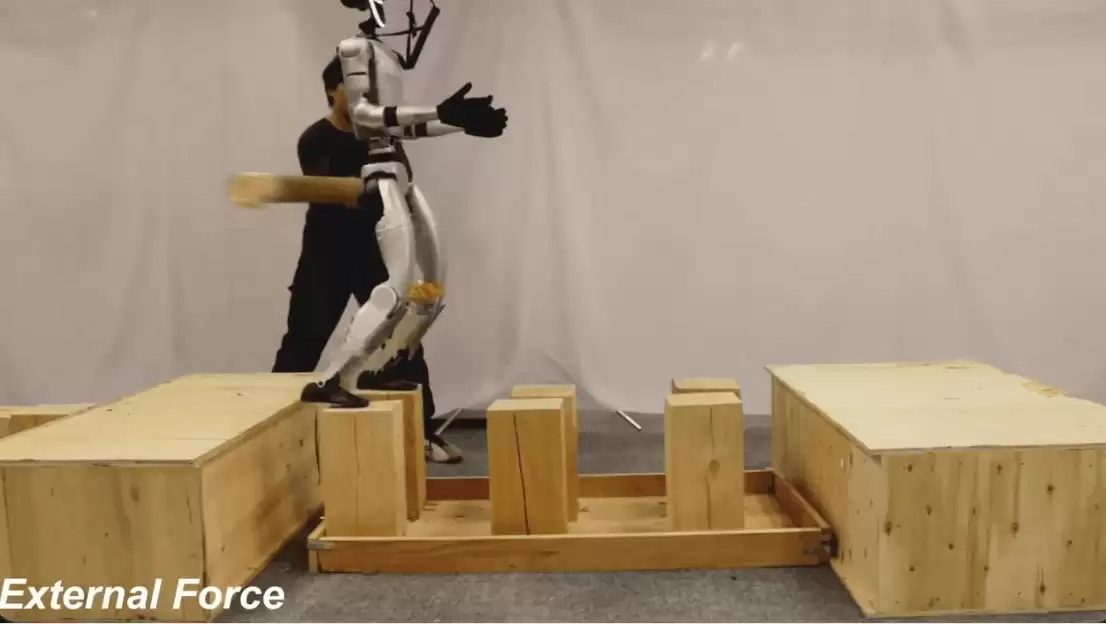
平衡性方面,即使背负6千克重物、遭受外力干扰,G1依然能够稳稳穿越这些复杂地形。
网友的评论恰到好处:“越看越像人形机器人去少林寺训练进修了,疑是中国功夫片场景流出。”

那么,BeamDojo是怎么做到的?核心创新点主要集中在以下几个方面:
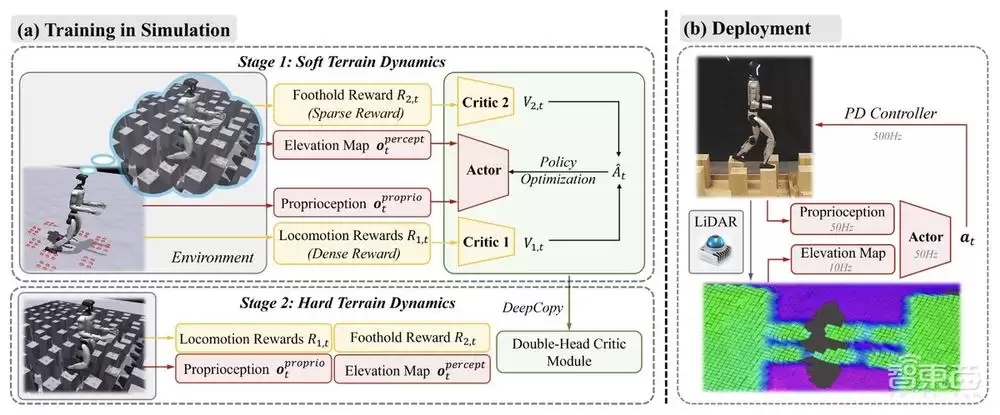
首先是两阶段的强化学习训练策略。第一阶段让机器人在平地上训练,通过输入地形参数,让算法在安全环境中完成预学习;第二阶段才切换到实际任务地形,进行策略优化。这样的设计让学习效率大幅提升。
其次是专门为多边形脚掌量身定制的基于采样的落脚点奖励机制。研究团队还采用了“双评价器”架构,用来平衡密集移动奖励和稀疏落脚点奖励之间的学习过程。
感知层面,框架搭载了基于激光雷达的高程地图系统,使机器人能够实时感知地形细节,为精准落脚提供数据支持。
最关键的是零样本泛化能力。G1在训练过程中从未接触过稀疏地形与平衡木,但通过BeamDojo,它却能在各类稀疏落脚点地形上直接完成任务,无需重新训练。
实验结果表明,BeamDojo在模拟环境中实现了高效学习,现实世界中同样表现出色——即使受到较大的外部干扰,机器人依然能保持较高成功率,精准落脚并灵活移动。这套框架未来还可进一步应用于沟壑等更具挑战性的复杂地形中。